MIT и Toyota работают над автономным автомобилем без картографической зависимости
Если вы когда-нибудь захотите покататься на машине без водителя, есть большая вероятность, что эта поездка состоится именно в городске. Но как насчет того, чтобы проехаться на участке сельской дороги, которая представляет собой простую асфальтированную полосу с такими природными объектами, как трава и деревья на обочине, где нет подробной трехмерной карты для ориентации транспортного средства?
Исследователи из Массачусетского технологического института работают над этой проблемой, и их стратегия заключается в том, чтобы научить беспилотный автомобиль ездить как люди.
Команда MIT и Toyota работали в городе Девон, Массачусетс, над своей системой MapLite. Они не использовали подробные карты, которые включают рельеф местности и особенности дорог, а также имеют большой объем памяти. Обычно для перемещения мы используем Карты Google. Такая карта называется топографической, она «дает только линейный сегмент, который показывает, какие дороги соединяются с другими», — говорит Тедди Орт, аспирант Массачусетского технологического института, изучающий робототехнику. «Но существует огромная разница между такой картой и картой, которую вы использовали бы для самоуправляющихся автомобилей в городе».

Подробные карты могут помочь автономным автомобилям точно знать, где они находятся в городе, где располагаются бордюры, знаки остановки и что впереди. Например, в проекте Drive.ai во Фриско, штат Техас, их автомобили, сначала управляемые людьми, использовали свои датчики для создания трехмерных карт высокого разрешения, которые им были необходимы для автономной работы позднее.
![]()
«В городских районах это хорошее, надежное решение, — говорит Орт. — Но они не работали в сельской местности.»
«Решение для городского картографирования действительно не очень хорошо масштабируется для огромной части страны».
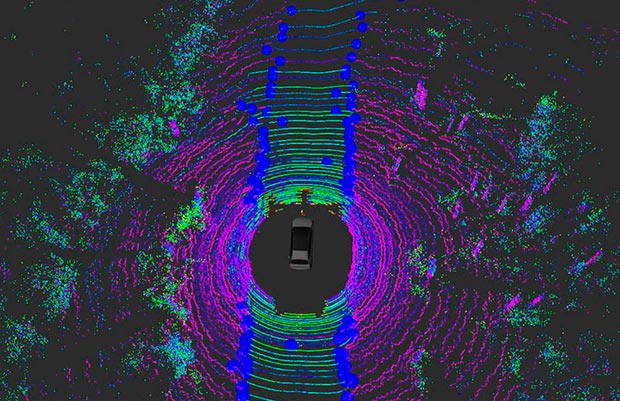
Таким образом, команда обратилась к подходу без использования детальной карты. Они использовали датчик LiDAR своего исследовательского автомобиля, который является обычным инструментом на автономных автомобилях, чтобы обнаружить разницу в фактуре между асфальтом и травой с обеих сторон. Их блок LiDAR состоял из 64 лазеров, вращающихся со скоростью 10 раз в секунду. Этот инструмент работает, потому что лазерный свет отражается и сообщает машине, как выглядит окружающая среда.
Лазерная система «смотрит на фактуру окружающей обстановки», говорит Орт. Дорога плоская, а рядом с ней трава, кусты и листья — нет.
Именно так автомобиль воспринимает дорогу перед собой, но он все равно должен знать, как доехать до места назначения без большой 3D-карты. Чтобы сделать это, Орт выбрал «локальную цель навигации» — точку впереди дороги, которую может видеть автомобиль, чтобы ехать к ней. Но он не просто доедет к точке и остановится. Транспортное средство должно постоянно обновлять эту цель при приближении к ней.
![]()
С помощью датчиков система видит дорогу на 30 метров вперед.
«Локальная цель постоянно обновляется настолько далеко, насколько может видеть автомобиль», — говорит Орт, отмечая, что они обновляют ее пять раз в секунду. Чем быстрее вы обновите эту локальную цель, тем быстрее вы сможете двигаться, поэтому ее изменение пять раз в секунду означает, что вы можете путешествовать со скоростью 55 миль в час.
«На самом деле это очень похоже на то, как ведут себя люди», — отмечает Орт. Люди могут иметь конечный пункт назначения, но когда они фактически управляют автомобилем в дороге, они просто смотрят вперед и движутся к постоянно меняющейся точке, которую они могут видеть перед собой.
![]()
Основная особенность новой системы заключается в том, что она позволяет машине ориентироваться в незнакомой местности.
В конечном счете, он рассматривает технологию как один из способов «вывести самоуправляющиеся транспортные средства из города».
Источник: Popular Science
Разное




Компания Marshall официально анонсировала новую лимитированную версию беспроводной акустики Acton III, посвященную 60-летию с момента, когда легендарный гитарист Джими Хендрикс впервые подключился к усилителю Marshall. Новинка получила название Marshall Acton III — Jimi Hendrix 60th Anniversary Edition и сочетает знакомую акустическую платформу с полностью обновленным дизайном, вдохновленным образом одного из самых влиятельных музыкантов в истории рок-музыки.