

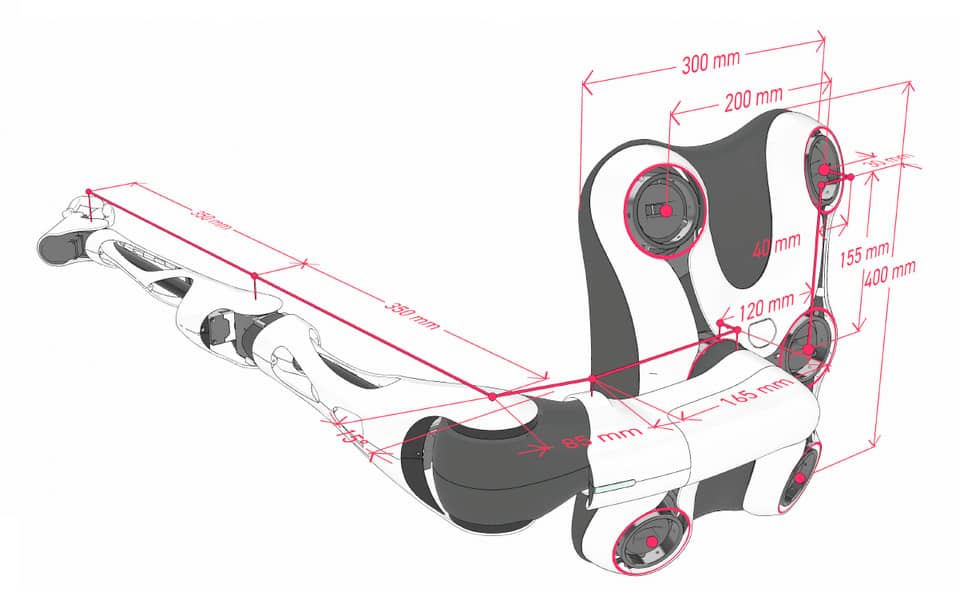
Він надягається на спину або кріпиться до торса людини за допомогою ременів. Система має модульну конструкцію із шістьма портами. Всі вони встановлені у різних площинах, щоб встановлені в них кінцівки не заважали один одному. Кисті також знімні і за необхідності їх можна замінити на інші.

Однак, регулярно використовувати такий пристрій за всіх його привабливих переваг поки що може бути буквально важко. Основний блок важить 4,1 кілограма, а якщо додати до нього чотири руки — 14 кілограмів.

Для управління роборуками вчені розробили спеціальну програму на ПК, а також контролер, який схожий на зменшену копію головного блоку з встановленими кінцівками. Використовувати його можуть як користувачі, так і сторонні оператори.
Автори зазначають, що поки що така система контролю далека від досконалості. Керувати кількома руками одночасно досить складно і для цього їм доводиться задіяти кілька операторів. Але раніше інші японські інженери підтвердили, що люди можуть це робити за допомогою нейроінтерфейсів. Отже можна припустити, що це вирішувана проблема.
Джерело: acm







































